A strapdown inertial navigation system consists of body mounted accelerometers, gyroscopes, a computer (navigation/attitude computer) and instrument electronics such as power conditioning, input/output interface.
Accelerometers and gyroscopes which are composed with an electronic processor to form an inertial measurement unit (IMU), measure the specific force and the rotation rates of the body frame with respect to the inertial frame (non-rotating fixed frame). Rotation rates measured by the gyroscopes are used in attitude computation which yields a direction cosine matrix used to transform acceleration vectors between the body and navigation frames. The transformed acceleration vector is used to calculate position and velocity. Navigation frame rotation rates required for attitude computations are also calculated in navigation computer.
As a result, inertial navigation system is composed of an inertial measurement unit providing acceleration and rotation measurements, and a computer implementing coordinate frame transformations and navigation calculations.
Strapdown navigation systems rely on rate and acceleration measurements and initial position and velocity information to provide position and velocity. However, errors on sensor readings caused by bias, scale factors, thermal/magnetic effects, other nonlinearities and initialization offsets cause an accumulation in navigation errors. Since an inertial navigation system is a dead reckoning system, any lack of precision is passed from one evaluation to the next and navigation solution drifts with time. Thus, the accuracy of strapdown systems are predominantly governed by the accuracy of the sensors and improved accuracy can be achieved through the use of more accurate sensors. However, employing more accurate sensors clearly lead to very expensive solutions which are not affordable for many applications.
An alternative approach is to use an additional information source in order to improve the accuracy of the inertial navigation system. This is the principle of an aided inertial system where one or more navigation system outputs are compared to the corresponding outputs of an external system and fed into an optimum filter to generate corrections to the navigation system. There exist different types of sensors used as external system to improve the accuracy of the inertial navigation such as Doppler radar, baro-altimeter, radar altimeter, terrain map, airspeed indicator and miscellaneous radio navigation aids. In most modern integrated navigation applications, external aid sensor utilized is a type of satellite radio navigation with low cost, high accuracy and global coverage known as Global Navigation Satellite System (GPS). GNSS integrated INS systems have become the major navigation tool in recent years for applications such as automotive, robotics and unmanned autonomous vehicles. Current technological trend makes these integrated navigation systems a part of our daily life.

Heading initialization may be completed using different sources and techniques. User may choose relevant technique in order to initialize the heading.
Initial heading alignment technique differs with respect to user’s choice. When the magnetic heading is selected for heading initialization, yaw is initialized using the 3D magnetometer measured Earth’s magnetic field. When the magnetometer is enabled, it is the default source for initial heading. User should depend on magnetometer for initial heading estimation if and only if the magnetometer is calibrated, respectively. Magnetometer should not be used unless the sensor is operated in a good magnetic environment away from magnetic disturbances.
If the velocity heading is selected for initialization, the velocity information from the GNSS is used to align the INS while in motion. The heading is estimated using GNSS course over ground. This alignment technique is suitable for the land vehicles, motion of which is coincident with the forward axis. The procedure is not suitable for airborne and marine applications where the vehicle motion in the plane perpendicular to the forward axis is not zero.
In ArNav, the user may align the system with external heading. Selecting external heading option enables user to feed the system with heading information. In this approach, the yaw angle (heading) and its uncertainty are entered to the system by the user. After the alignment, the accuracy of the attitude solution increases as the system experiences dynamics.
ArNav M2HD is capable of initializing heading using carrier phase measurements under any circumstances using sophisticated algorithms exploiting the advantages of double antenna configuration.
Earth’s magnetic field, also known as the geomagnetic field, is the magnetic field that goes from South to North pole. Poles are not exactly aligned with the geographic North-South axis and is approximately tilted with respect to Earth’s rotational axis. This causes an offset, known as magnetic declination, between the magnetic and geographic north. Although the magnetic field is stable over time, the magnitude and direction changes with respect to the location. The magnitude of the Earth’s magnetic field at its surface ranges from 0.25 Gauss to 0.65 Gauss. Moreover, local declinations can reach to tens of degrees. National Oceanic and Atmospheric Administration (NOAA) releases model coefficients of actual Earth’s magnetic field at 5-year intervals, with World Magnetic Model (WMM).
Magnetometer measures the Earth’s magnetic field and enables the systems to compute heading. However, magnetic sensors are sensitive to the surroundings, and the magnetic data is almost always distorted. The magnetic distortion can be separated into two categories:
Magnetometer measures the Earth’s magnetic field and enables the system to compute heading. However, magnetic sensors are sensitive to the surroundings, and the magnetic data is affected. The magnetic sensors should be compensated in order to overcome environmental magnetic effects and ensure accurate heading solutions.
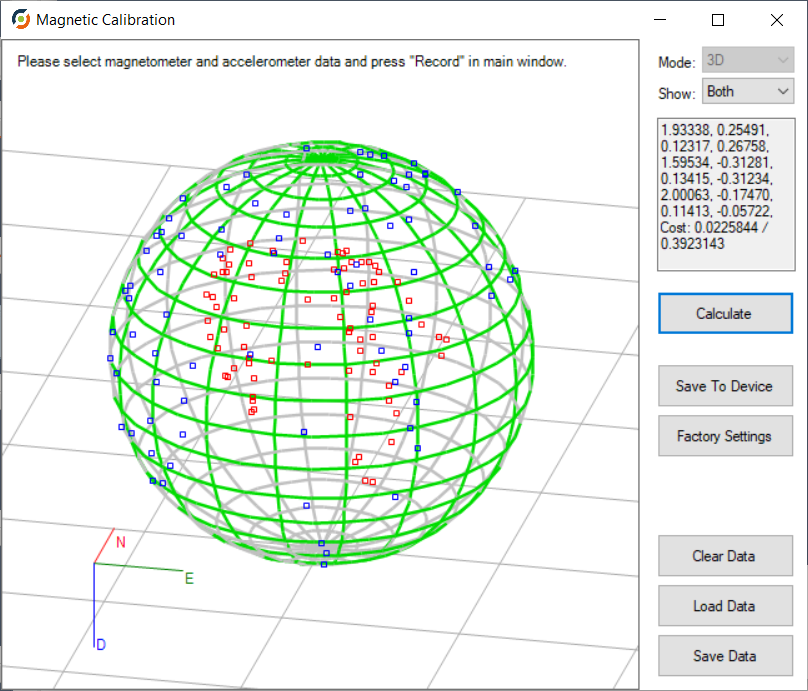
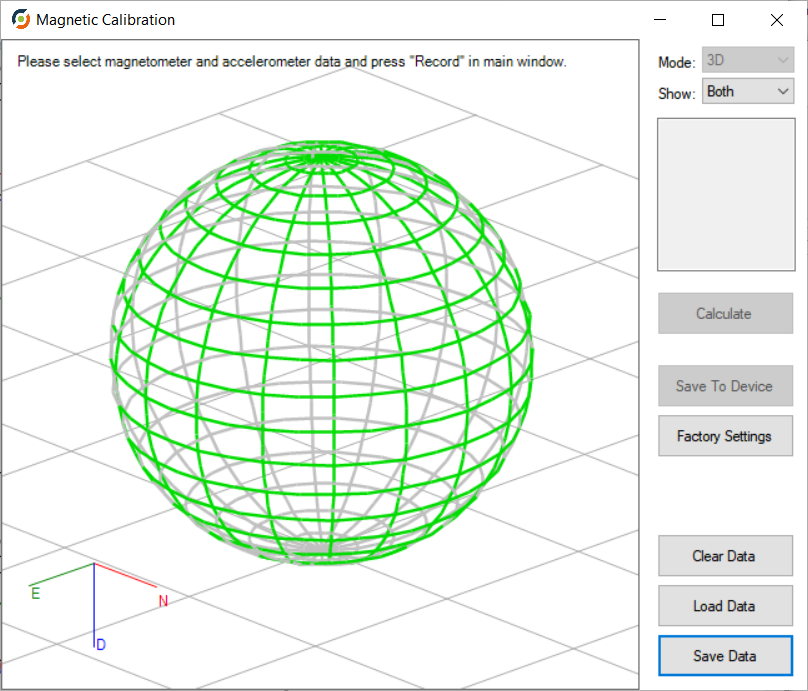
All of the ArNav products compensate the soft iron and hard iron effect using only the Earth’s magnetic field vector and a compensation algorithm. The systems collect a series of measurements and send these to magnetic calibration algorithm.
The algorithm allows the determination of the hard iron and soft iron parameters at the same time. Calibration process takes only a few minutes and the computed values are then stored to the navigation system.
ArView includes 2D and 3D magnetic calibration algorithms. The magnetic calibration procedure may be online or offline. Either the productcan be directly connected to a computer for online data collection or it is possible to calibrate the system using data from a log file. A log file may be generated by the user manually.
Ürünlerimiz ve hizmetlerimiz hakkında bilgi almak için formu doldurun.
Error: Contact form not found.
{kind=link}